
PID Ramblings

Silicon Foot Mold

Stable Body Positioning

Walking Development

Building the Robot!

Control Board V1!

Fixing Interpolation

IT... Y-axis Movement

Two axis!

Adding interpolation!

Currently, I'm working on:
⟶ I've been struggling to develop dynamic walking all week... It's not going far, unfortunately. ― August 17, 2021
Finished SimpleFusion, my imu fusion library that uses a complementary filter. I'll be using it for this project! ― August 5, 2021
The quadruped walks with the new legs! It's unstable, (time to add dynamic stability) but moves fowards... straight! ― July 30, 2021
Installed new 100mm legs! These should help to make the legs stronger; shorter legs means higher end-effector torque and higher (relatively speaking) stances while reducing instability. This thing will be walking soon! ― July 29, 2021
The static walking gait simulator is finished, and now I'm working on making dynamic walking working! The robot can already respond to IMU feedback to keep its body level! ― July 26, 2021
Fixing the bugs in my code. For some reason, the robot will start taking steps further away from itself! ― July 12, 2021
Redesigning my entire gait architecture to make it easier to create custom gaits and stepping patterns. ― July 10, 2021
New teensy 4.1 has arrived, which means that I can start working on the walking gaits more this week! ― June 30, 2021
I started an internship at ModalAI, a company focusing on creating autonomous drones. I'm really looking forward to it! ― June 21, 2021
Nooooooooooooo!!!!!!!!!! The micro usb port on the teensy 4.1 I've been using broke off the board. I need to get a new one... which means that my development will be stalled for a few days. 😭 ― June 24, 2021
I'm struggling to get the walking to work well. While the robot can move forwards and backwards, going sideways is more difficult. I looks like this is a result of the feet not taking high enough steps... "walking" is more like skating. Making the steps higher ony helps to solve the problem a little since that results in poor walking balance. ― June 22, 2021
Ahhh... the robot is so close to walking! I've found a critical issue in the feet of the bot... it seems like they are much more important than I had thought. I'll make a post on it soon! ― June 20, 2021
Parts have been redesigned and reprinted! I'll continue finding good walking gaits tomorrow. ― June 18, 2021
Walking gaits are working! I need to play around with the parameters for the first gait I added (the trot), and need to reprint some parts that I broke on the first walking attempt. ― June 17, 2021
Initial commit of the gait managing classes in QuadrupedKinematics. There are now three files, Quadruped.h, StepPlanner.h, and Kinematics.h that organize the movement. ― June 15, 2021
Struggling to organize the walking gaits and the OOP for a new robot library. ― June 13, 2021
Finished allowing kinematics library to support all legs! Now all legs can be controlled. ― June 12, 2021
Building the robot. It's taking a while... On hour 3 already! ― June 3, 2021
Received the PCB! It looks great, and I'll start working on it shortly. ― June 1, 2021
Finished an 11 hour print of the main chasis and received new chips for the upcoming PCB! ― May 23, 2021
Finished version 1.1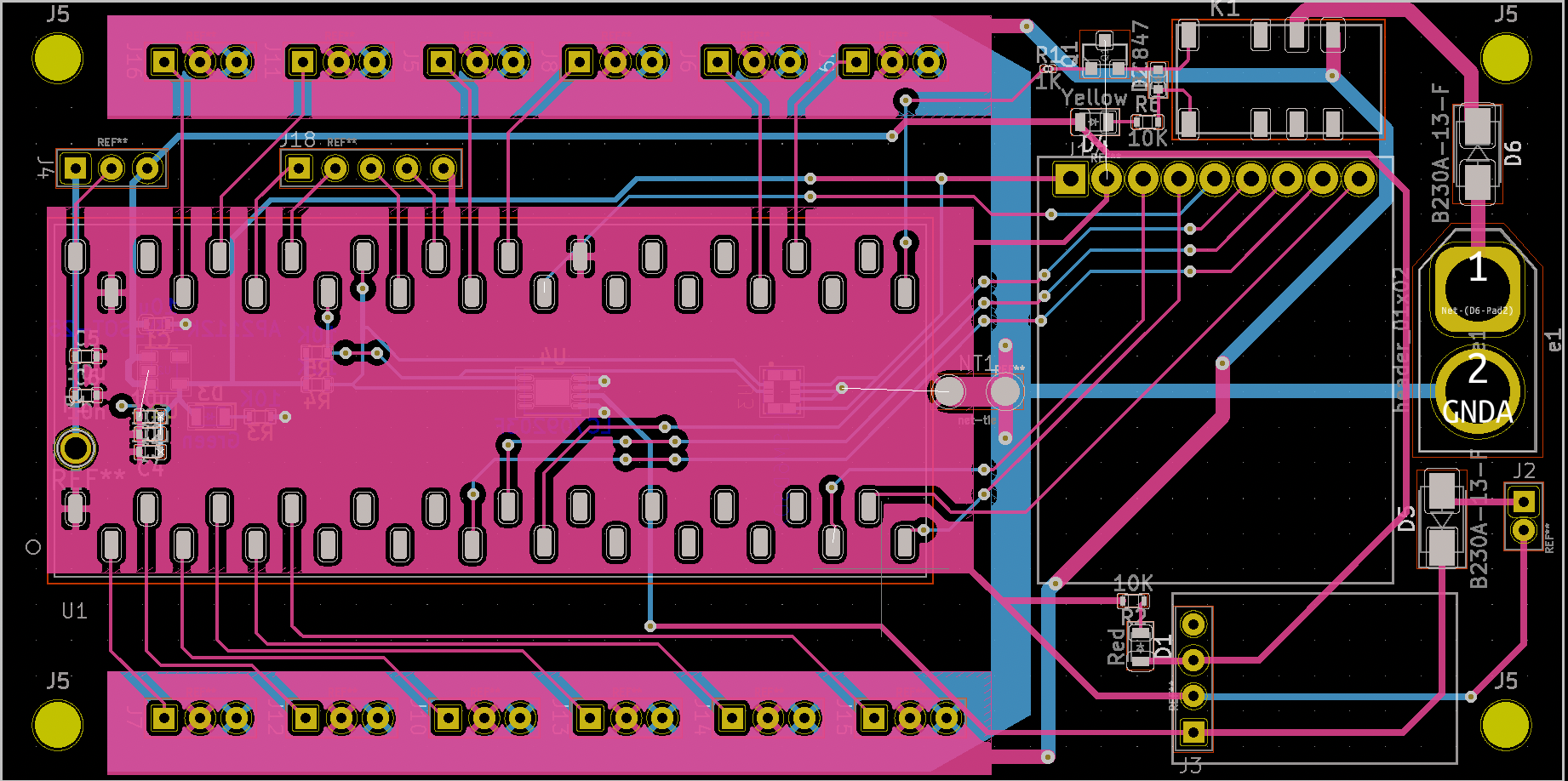 of the PCB layout after making revisions to 1.0! ― May 18, 2021
of the PCB layout after making revisions to 1.0! ― May 18, 2021
Finished an updated CAD model that is compatible with the upcoming board! The next version of the robot will feature a much larger PSU and much, much fewer wires (because of the PCB) ― May 14, 2021
Experimenting with the PCB layout for the new control board and building a prototype LoRA remote controller on a breadboard! ― May 14, 2021
for the new control board and building a prototype LoRA remote controller on a breadboard! ― May 14, 2021
The new robot design (to fix power supply placement) and the schematic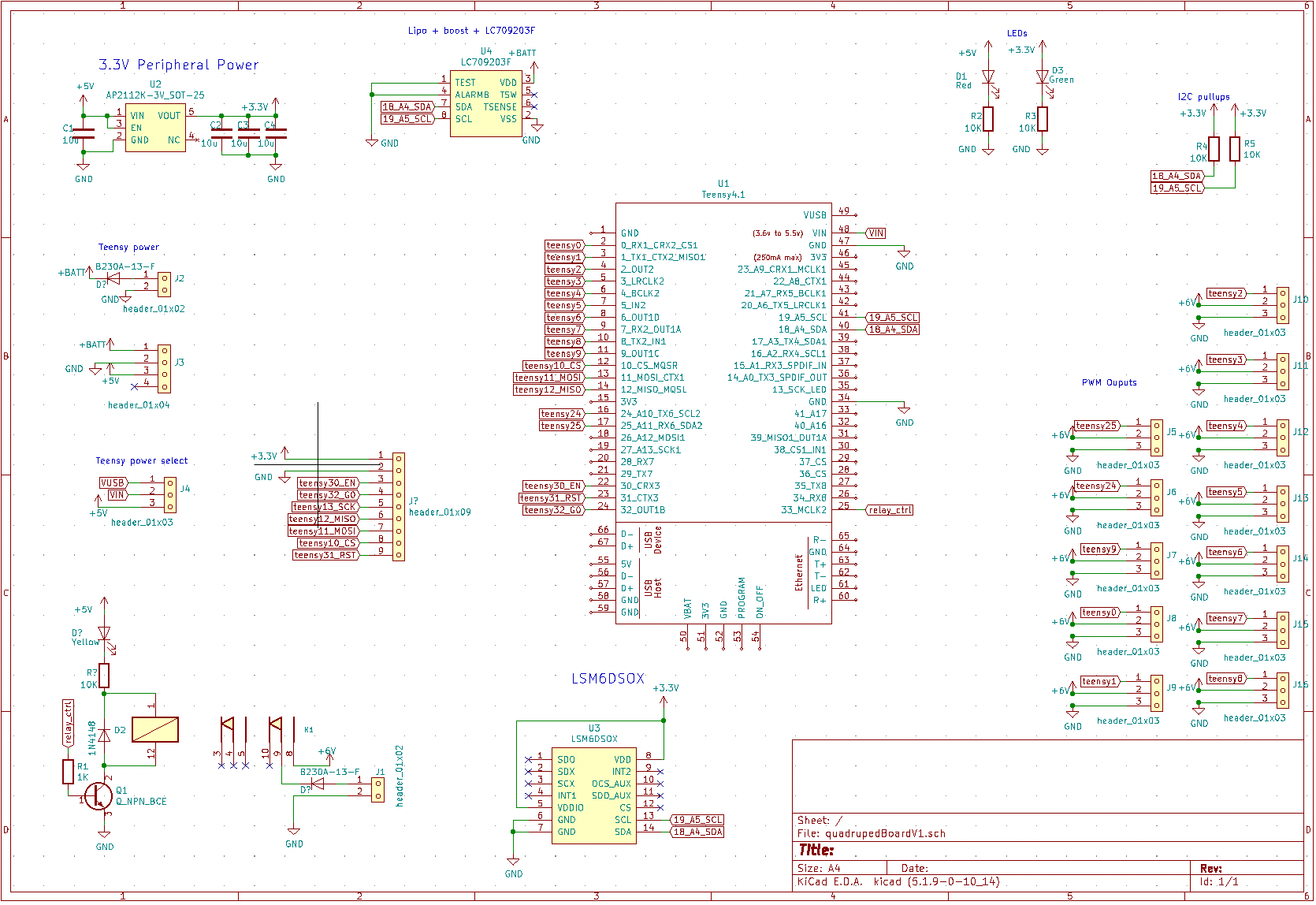 for the new control board! ― April 30, 2021
for the new control board! ― April 30, 2021
Testing out the LSM6DSOX imu and the LC709203F battery gauge sensors for the a new board! ― April 20, 2021
Upgrading the lower leg motor the offset beam with nylon bushings and added locking nuts to the motor bolts for tightness ― April 7, 2021
Math for the y-axis movement and programming it in the library ― April 5, 2021
Programming the x-axis movement into the library (and testing) ― March 23, 2021
Programming the z-axis movement and starting the library ― February 6, 2021